IIT Kanpur develops Bio-inspired Artificial Muscle for Next Gen Space Robots and Medical Prostheses
Kanpur : The Smart Materials, Structures and Systems (SMSS) Lab at the Indian Institute of Technology (IIT), Kanpur, has developed a Bio-inspired Artificial Muscle for Next-Generation Space Robots and Medical Prostheses. Encouraged by the industry demand and growth in the field of miniature, light weight, non-magnetic gear-free actuators, shape memory alloy (SMA) based actuators have emerged with an excellent power-to-weight ratio as a suitable alternative to the conventional actuators. However, existing SMA actuators have limited scope in terms of higher force or torque output due to the relatively simple architecture of the actuation mechanism. To address this limitation, the SMSS Lab at IIT Kanpur, inspired by the Portescap CSR funding, have expanded the design space of the SMA actuator by leveraging the characteristics of bi-pennate muscle architecture with about 70% enhanced muscle force output per unit weight. This will result in the creation of a new class of Space Robots which will reinforce the Indian Space Technology. The team is led by Prof. Bishakh Bhattacharya, Professor, Department of Mechanical Engineering at IIT Kanpur, and consists Kanhaiya Lal Chaurasiya, Senior Project Engineer, Mechanical Engineering, IIT Kanpur; Abhishek Kumar Singh, Senior Project Mechanic; A Sri Harsha, and Yashaswi Sinha, Project Engineer, Mechanical Engineering, IIT Kanpur.
Prof. Abhay Karandikar, Director, IIT Kanpur said, “Shape memory alloy (SMA) based actuators are considered better alternatives to the conventional actuators, although it has some limitations. Researchers at the SMSS Lab at IIT Kanpur worked upon those limitations and has developed this unique shape memory alloy-based bio-inspired muscle design that holds the potential to revitalize the Space Robotics and bio-medical technology industry. This invention will not only result in the development of Next Gen Space Robots and Medical Prostheses, but will also help aviation and some other industries. In a way, it will help make multiple sectors self-reliant and more advanced in the long run. I congratulate the whole team for this invention.”
The primary goal of an actuator is to generate mechanical output, such as force and displacement, by transforming electrical energy. Shape memory alloys are a class of smart materials that can restore their shape after being exposed to high temperatures. The interesting property of the customizable multi-stage hierarchy of the shape memory alloy-based bio-inspired muscle design will also encourage researchers in the domain of bio-mechatronics to develop adaptive robotic prostheses for bio-medical application in the country. This will significantly reduce (one third of the current cost) the cost of bio-medical devices and increase the affordability of high performance systems like MRI Scanner, CT scanner and Surgical Robots. The technology will also enable development of patient rooms with low maintenance and quieter operation.
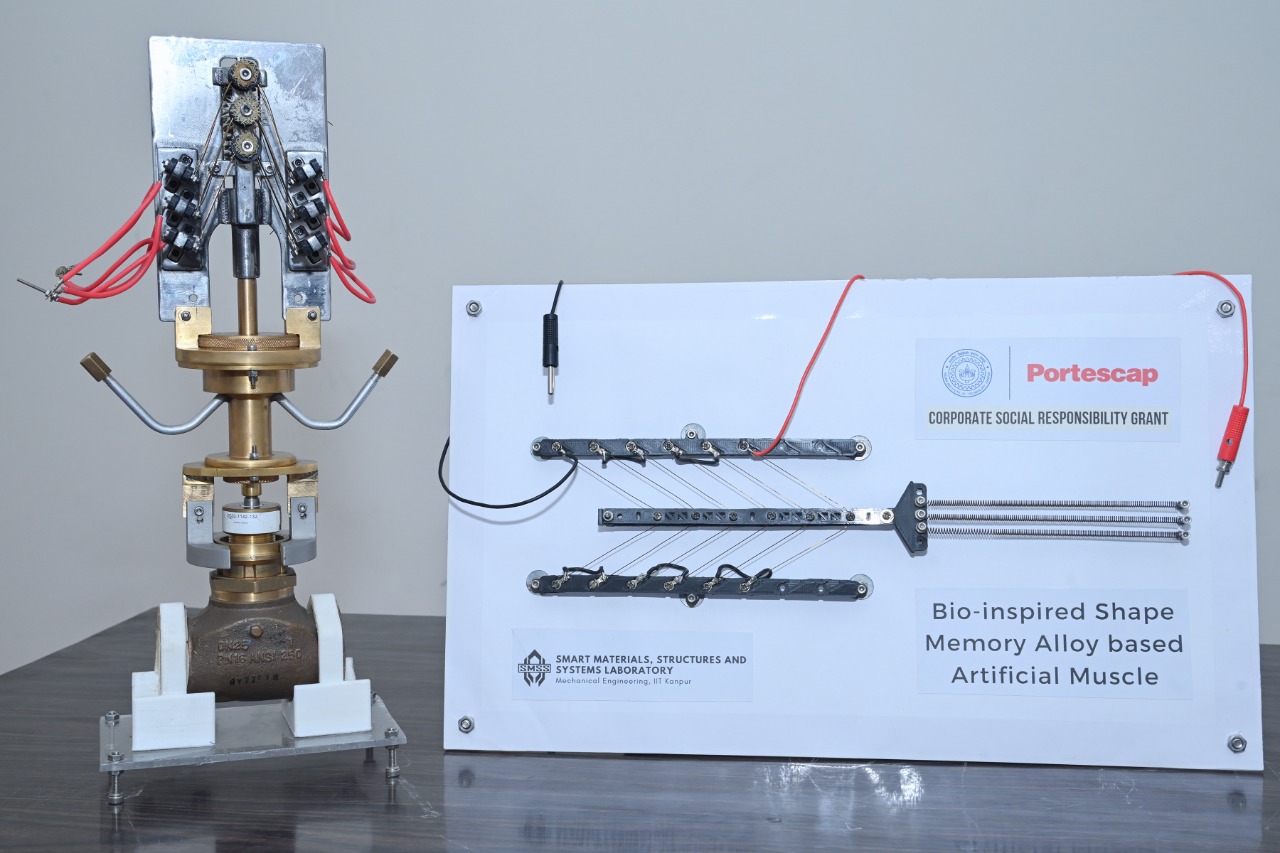
Hitherto, this unique and novel concept has not been reported in the literature (e.g. journals etc.). The biological advantage of using pennate muscle is that the fibers are obliquely inclined to the muscle line of action, allowing the fiber force to be coupled to macro-level muscle force, leading to five to six times high force generation. The work has been published in Nature Scientific Reports. The impact of the paper is multidimensional. By using the shape memory alloy-based bi-pennate actuator as a novel driving principle other than electromagnetism, the system can cater to the need of an alternative for gear-based conventional actuators from the miniature motor industry.
The use of the proposed product will foster higher utilization rates for a broad-band of gripping force and hence a better cost-benefit ratio. The current bio-mimic approach can also be used to develop rotary motion for medium to high torque applications as well as a bio-inspired variable force gripper system with potential application in mobile robotics. In addition, the same technology can be utilized for industrial applications like HVAC flow control for Smart Buildings, Automobiles and maximizing Solar panel performance. Efficient Turbine design for Aircraft applications and automatic control of aircraft wing will also be possible through this technology.
Comments are closed.